






















Gili Bisker
In a recently published article entitled “Nonequilibrium associative retrieval of multiple stored self-assembly targets” in PNAS (2018) and Nature Physics (2020), Zuckerman Faculty Scholar and PI of the Bisker Lab at Tel Aviv University sheds light on distinctive phenomena that emerge through non equilibrium driving.
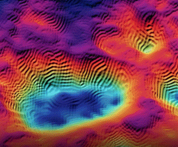
Major experimental research efforts have gone into investigating general principles governing self-assembly under nonequilibrium driving. However, in contrast to equilibrium scenarios, where the system tends to find local minima in the free-energy landscape, there is no equivalent theoretical framework for systems operating far from equilibrium. Inspired by many examples of nonequilibrium self-assembly in living systems, we set out to explore the added benefits achieved by nonequilibrium driving and identify distinctive collective phenomena that emerge in this regime. We demonstrate the interplay between the assembly speed, kinetic stability, and relative population of dynamical attractors, aiming to provide insights into nonequilibrium self-assembly processes and lay the foundations for understanding biomolecular cases as well as for designing examples.
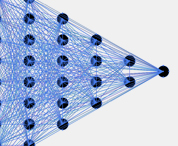
Many biological systems rely on the ability to self-assemble different target structures using the same set of components. Equilibrium self-assembly suffers from a limited capacity in such cases, due to an increasing number of decoy states that grows rapidly with the number of targets encoded. Moreover, improving the kinetic stability of a target at equilibrium carries the price of introducing kinetic traps, leading to slower assembly. Using a toy physical model of interacting particles, we demonstrate that local driving can improve both the assembly time and kinetic stability of multitarget self-assembly, as well as reduce fluctuations around the target configuration. We further show that the local drive can result in a steady-state probability distribution over target structures that deviates from the Boltzmann distribution in a way that depends on the types of interactions that stabilize the targets. Our results illustrate the role that nonequilibrium driving plays in overcoming tradeoffs that are inherent to equilibrium assemblies.
